DSConv 是ICCV2023 提出的一种受变形卷积启发提出的融合拓扑控制的卷积,其主要针对血管类似的细长形态目标的分割,具体内容可以去阅读论文:https://arxiv.org/abs/2307.08388
所以如果你的项目中有类似血管这种细长形态的目标,可以尝试一下蛇形卷积
代码链接 :https://github.com/YaoleiQi/DSCNet
主要文件就是 DSConv.py,首先测试了经过DSConv的维度前后变化,
from models.DSConv_dev import My_DSConv,DSConv
from models.yolo import Conv
import os
import numpy as np
import torch
img = torch.randn(2,3,64,64)
stdconv = Conv(3,64,5,2)
dsconv = DSConv(3,64,5,2,0,True)
my_dsconv = My_DSConv(3,64,5,2)
os.environ["CUDA_VISIBLE_DEVICES"] = '0'
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(next(stdconv.parameters()).is_cuda)
if torch.cuda.is_available():
img = img.to(device)
stdconv = stdconv.to(device)
dsconv = dsconv.to(device)
my_dsconv = my_dsconv.to(device)
print(dsconv(img).shape)
print(stdconv(img).shape)
print(my_dsconv(img).shape)输出结果
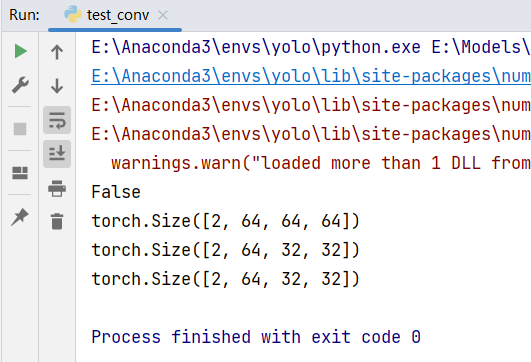
可以看到输入 (2,3,64,64)
dsconv 输出为 (2,64,64,64)长宽未发生变化
DSConv的构造函数如下
class DSConv(nn.Module):
def __init__(self, in_ch, out_ch, kernel_size, extend_scope, morph,
if_offset, device):
"""
The Dynamic Snake Convolution
:param in_ch: input channel
:param out_ch: output channel
:param kernel_size: the size of kernel
:param extend_scope: the range to expand (default 1 for this method)
:param morph: the morphology of the convolution kernel is mainly divided into two types
along the x-axis (0) and the y-axis (1) (see the paper for details)
:param if_offset: whether deformation is required, if it is False, it is the standard convolution kernel
:param device: set on gpu
"""其中
extend_scope 为形态的控制范围 这里是 -1~1
morph 蛇形卷积的拓扑形式 0 ,1
if_offset 是否使用蛇形卷积,默认为True 使用
由于经过 dsconv 输出不改变 长宽
但是在YOLOv5中,卷积常设置stride=2,来降低特征图尺寸,为了让DSConv也能实现这一效果,我进行了一次封装,并向外提供一个参数 s,是否降低,具体方式就是将 DSConv的输出经过一次MaxPooling【大家有什么好的想法可以讨论一下】,封装代码如下:
class My_DSConv(nn.Module):
def __init__(self, c1, c2, k, s,p=None):
super().__init__()
self.dsconv = DSConv(c1, c2, kernel_size=k, extend_scope=1,morph=0,if_offset=True)
self.pool = nn.MaxPool2d(s)
def forward(self, x):
return self.pool(self.dsconv(x))除此之外,还设置了 p=None 这一参数,是为了和Conv一致【这里的处理有一点问题】
还有一个要处理的问题是,官方提供的代码 GPU/CPU 的设定是通过 一个参数来确定,大家如果直接这样封装后使用会发现 出现 error 提示数据 不在同一个设备上
这里具体处理就不展开了,直接提供我处理后的文件,复制后文件命名为 DSConv_dev.py 放在models文件夹下
# -*- coding: utf-8 -*-
import os
import torch
import numpy as np
from torch import nn
import warnings
warnings.filterwarnings("ignore")
"""
This code is mainly the deformation process of our DSConv
"""
# conv (ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)
# dsconv (in_ch, out_ch, kernel_size, extend_scope, morph,if_offset)
class My_DSConv(nn.Module):
def __init__(self, c1, c2, k, s,p=None):
super().__init__()
self.dsconv = DSConv(c1, c2, kernel_size=k, extend_scope=1,morph=0,if_offset=True)
self.pool = nn.MaxPool2d(s)
def forward(self, x):
return self.pool(self.dsconv(x))
class DSConv(nn.Module):
def __init__(self, in_ch, out_ch, kernel_size, extend_scope, morph,
if_offset):
"""
The Dynamic Snake Convolution
:param in_ch: input channel
:param out_ch: output channel
:param kernel_size: the size of kernel
:param extend_scope: the range to expand (default 1 for this method)
:param morph: the morphology of the convolution kernel is mainly divided into two types
along the x-axis (0) and the y-axis (1) (see the paper for details)
:param if_offset: whether deformation is required, if it is False, it is the standard convolution kernel
:param device: set on gpu
"""
super(DSConv, self).__init__()
# use the <offset_conv> to learn the deformable offset
self.offset_conv = nn.Conv2d(in_ch, 2 * kernel_size, 3, padding=1)
self.bn = nn.BatchNorm2d(2 * kernel_size)
self.kernel_size = kernel_size
# two types of the DSConv (along x-axis and y-axis)
self.dsc_conv_x = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(kernel_size, 1),
stride=(kernel_size, 1),
padding=0,
)
self.dsc_conv_y = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(1, kernel_size),
stride=(1, kernel_size),
padding=0,
)
self.gn = nn.GroupNorm(out_ch // 4, out_ch)
self.relu = nn.ReLU(inplace=True)
self.extend_scope = extend_scope
self.morph = morph
self.if_offset = if_offset
def forward(self, f):
offset = self.offset_conv(f)
offset = self.bn(offset)
# We need a range of deformation between -1 and 1 to mimic the snake's swing
offset = torch.tanh(offset)
input_shape = f.shape
dsc = DSC(input_shape, self.kernel_size, self.extend_scope, self.morph)
deformed_feature = dsc.deform_conv(f, offset, self.if_offset)
if self.morph == 0:
x = self.dsc_conv_x(deformed_feature)
x = self.gn(x)
x = self.relu(x)
return x
else:
x = self.dsc_conv_y(deformed_feature)
x = self.gn(x)
x = self.relu(x)
return x
# Core code, for ease of understanding, we mark the dimensions of input and output next to the code
class DSC(object):
def __init__(self, input_shape, kernel_size, extend_scope, morph):
self.num_points = kernel_size
self.width = input_shape[2]
self.height = input_shape[3]
self.morph = morph
self.extend_scope = extend_scope # offset (-1 ~ 1) * extend_scope
# define feature map shape
"""
B: Batch size C: Channel W: Width H: Height
"""
self.num_batch = input_shape[0]
self.num_channels = input_shape[1]
"""
input: offset [B,2*K,W,H] K: Kernel size (2*K: 2D image, deformation contains <x_offset> and <y_offset>)
output_x: [B,1,W,K*H] coordinate map
output_y: [B,1,K*W,H] coordinate map
"""
def _coordinate_map_3D(self, offset, if_offset):
# offset
device = offset.device
y_offset, x_offset = torch.split(offset, self.num_points, dim=1)
y_center = torch.arange(0, self.width).repeat([self.height])
y_center = y_center.reshape(self.height, self.width)
y_center = y_center.permute(1, 0)
y_center = y_center.reshape([-1, self.width, self.height])
y_center = y_center.repeat([self.num_points, 1, 1]).float()
y_center = y_center.unsqueeze(0)
x_center = torch.arange(0, self.height).repeat([self.width])
x_center = x_center.reshape(self.width, self.height)
x_center = x_center.permute(0, 1)
x_center = x_center.reshape([-1, self.width, self.height])
x_center = x_center.repeat([self.num_points, 1, 1]).float()
x_center = x_center.unsqueeze(0)
if self.morph == 0:
"""
Initialize the kernel and flatten the kernel
y: only need 0
x: -num_points//2 ~ num_points//2 (Determined by the kernel size)
!!! The related PPT will be submitted later, and the PPT will contain the whole changes of each step
"""
y = torch.linspace(0, 0, 1)
x = torch.linspace(
-int(self.num_points // 2),
int(self.num_points // 2),
int(self.num_points),
)
y, x = torch.meshgrid(y, x)
y_spread = y.reshape(-1, 1)
x_spread = x.reshape(-1, 1)
y_grid = y_spread.repeat([1, self.width * self.height])
y_grid = y_grid.reshape([self.num_points, self.width, self.height])
y_grid = y_grid.unsqueeze(0) # [B*K*K, W,H]
x_grid = x_spread.repeat([1, self.width * self.height])
x_grid = x_grid.reshape([self.num_points, self.width, self.height])
x_grid = x_grid.unsqueeze(0) # [B*K*K, W,H]
y_new = y_center + y_grid
x_new = x_center + x_grid
y_new = y_new.repeat(self.num_batch, 1, 1, 1).to(device)
x_new = x_new.repeat(self.num_batch, 1, 1, 1).to(device)
y_offset_new = y_offset.detach().clone()
if if_offset:
y_offset = y_offset.permute(1, 0, 2, 3)
y_offset_new = y_offset_new.permute(1, 0, 2, 3)
center = int(self.num_points // 2)
# The center position remains unchanged and the rest of the positions begin to swing
# This part is quite simple. The main idea is that "offset is an iterative process"
y_offset_new[center] = 0
for index in range(1, center):
y_offset_new[center + index] = (y_offset_new[center + index - 1] + y_offset[center + index])
y_offset_new[center - index] = (y_offset_new[center - index + 1] + y_offset[center - index])
y_offset_new = y_offset_new.permute(1, 0, 2, 3).to(device)
y_new = y_new.add(y_offset_new.mul(self.extend_scope))
#
# test = y_offset_new.mul(self.extend_scope)
# y_new = y_new.to(test.device)
# y_new = y_new.add(test)
#
y_new = y_new.reshape(
[self.num_batch, self.num_points, 1, self.width, self.height])
y_new = y_new.permute(0, 3, 1, 4, 2)
y_new = y_new.reshape([
self.num_batch, self.num_points * self.width, 1 * self.height
])
x_new = x_new.reshape(
[self.num_batch, self.num_points, 1, self.width, self.height])
x_new = x_new.permute(0, 3, 1, 4, 2)
x_new = x_new.reshape([
self.num_batch, self.num_points * self.width, 1 * self.height
])
return y_new, x_new
else:
"""
Initialize the kernel and flatten the kernel
y: -num_points//2 ~ num_points//2 (Determined by the kernel size)
x: only need 0
"""
y = torch.linspace(
-int(self.num_points // 2),
int(self.num_points // 2),
int(self.num_points),
)
x = torch.linspace(0, 0, 1)
y, x = torch.meshgrid(y, x)
y_spread = y.reshape(-1, 1)
x_spread = x.reshape(-1, 1)
y_grid = y_spread.repeat([1, self.width * self.height])
y_grid = y_grid.reshape([self.num_points, self.width, self.height])
y_grid = y_grid.unsqueeze(0)
x_grid = x_spread.repeat([1, self.width * self.height])
x_grid = x_grid.reshape([self.num_points, self.width, self.height])
x_grid = x_grid.unsqueeze(0)
y_new = y_center + y_grid
x_new = x_center + x_grid
y_new = y_new.repeat(self.num_batch, 1, 1, 1)
x_new = x_new.repeat(self.num_batch, 1, 1, 1)
y_new = y_new.to(device)
x_new = x_new.to(device)
x_offset_new = x_offset.clone()
if if_offset:
x_offset = x_offset.permute(1, 0, 2, 3)
x_offset_new = x_offset_new.permute(1, 0, 2, 3)
center = int(self.num_points // 2)
x_offset_new[center] = 0
for index in range(1, center):
x_offset_new[center + index] = (x_offset_new[center + index - 1] + x_offset[center + index])
x_offset_new[center - index] = (x_offset_new[center - index + 1] + x_offset[center - index])
x_offset_new = x_offset_new.permute(1, 0, 2, 3).to(device)
x_new = x_new.add(x_offset_new.mul(self.extend_scope))
y_new = y_new.reshape(
[self.num_batch, 1, self.num_points, self.width, self.height])
y_new = y_new.permute(0, 3, 1, 4, 2)
y_new = y_new.reshape([
self.num_batch, 1 * self.width, self.num_points * self.height
])
x_new = x_new.reshape(
[self.num_batch, 1, self.num_points, self.width, self.height])
x_new = x_new.permute(0, 3, 1, 4, 2)
x_new = x_new.reshape([
self.num_batch, 1 * self.width, self.num_points * self.height
])
return y_new, x_new
"""
input: input feature map [N,C,D,W,H];coordinate map [N,K*D,K*W,K*H]
output: [N,1,K*D,K*W,K*H] deformed feature map
"""
def _bilinear_interpolate_3D(self, input_feature, y, x):
device = y.device
y = y.reshape([-1]).float()
x = x.reshape([-1]).float()
zero = torch.zeros([]).int()
max_y = self.width - 1
max_x = self.height - 1
# find 8 grid locations
y0 = torch.floor(y).int()
y1 = y0 + 1
x0 = torch.floor(x).int()
x1 = x0 + 1
# clip out coordinates exceeding feature map volume
y0 = torch.clamp(y0, zero, max_y)
y1 = torch.clamp(y1, zero, max_y)
x0 = torch.clamp(x0, zero, max_x)
x1 = torch.clamp(x1, zero, max_x)
input_feature_flat = input_feature.flatten()
input_feature_flat = input_feature_flat.reshape(
self.num_batch, self.num_channels, self.width, self.height)
input_feature_flat = input_feature_flat.permute(0, 2, 3, 1)
input_feature_flat = input_feature_flat.reshape(-1, self.num_channels)
dimension = self.height * self.width
base = torch.arange(self.num_batch) * dimension
base = base.reshape([-1, 1]).float()
repeat = torch.ones([self.num_points * self.width * self.height
]).unsqueeze(0)
repeat = repeat.float()
base = torch.matmul(base, repeat)
base = base.reshape([-1])
base = base.to(device)
base_y0 = base + y0 * self.height
base_y1 = base + y1 * self.height
# top rectangle of the neighbourhood volume
index_a0 = base_y0 - base + x0
index_c0 = base_y0 - base + x1
# bottom rectangle of the neighbourhood volume
index_a1 = base_y1 - base + x0
index_c1 = base_y1 - base + x1
# get 8 grid values
value_a0 = input_feature_flat[index_a0.type(torch.int64)].to(device)
value_c0 = input_feature_flat[index_c0.type(torch.int64)].to(device)
value_a1 = input_feature_flat[index_a1.type(torch.int64)].to(device)
value_c1 = input_feature_flat[index_c1.type(torch.int64)].to(device)
# find 8 grid locations
y0 = torch.floor(y).int()
y1 = y0 + 1
x0 = torch.floor(x).int()
x1 = x0 + 1
# clip out coordinates exceeding feature map volume
y0 = torch.clamp(y0, zero, max_y + 1)
y1 = torch.clamp(y1, zero, max_y + 1)
x0 = torch.clamp(x0, zero, max_x + 1)
x1 = torch.clamp(x1, zero, max_x + 1)
x0_float = x0.float()
x1_float = x1.float()
y0_float = y0.float()
y1_float = y1.float()
vol_a0 = ((y1_float - y) * (x1_float - x)).unsqueeze(-1).to(device)
vol_c0 = ((y1_float - y) * (x - x0_float)).unsqueeze(-1).to(device)
vol_a1 = ((y - y0_float) * (x1_float - x)).unsqueeze(-1).to(device)
vol_c1 = ((y - y0_float) * (x - x0_float)).unsqueeze(-1).to(device)
outputs = (value_a0 * vol_a0 + value_c0 * vol_c0 + value_a1 * vol_a1 +
value_c1 * vol_c1)
if self.morph == 0:
outputs = outputs.reshape([
self.num_batch,
self.num_points * self.width,
1 * self.height,
self.num_channels,
])
outputs = outputs.permute(0, 3, 1, 2)
else:
outputs = outputs.reshape([
self.num_batch,
1 * self.width,
self.num_points * self.height,
self.num_channels,
])
outputs = outputs.permute(0, 3, 1, 2)
return outputs
def deform_conv(self, input, offset, if_offset):
y, x = self._coordinate_map_3D(offset, if_offset)
deformed_feature = self._bilinear_interpolate_3D(input, y, x)
return deformed_feature
# Code for testing the DSConv
if __name__ == '__main__':
# os.environ["CUDA_VISIBLE_DEVICES"] = '0'
# device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
A = np.random.rand(4, 5, 6, 7)
# A = np.ones(shape=(3, 2, 2, 3), dtype=np.float32)
# print(A)
A = A.astype(dtype=np.float32)
A = torch.from_numpy(A)
# print(A.shape)
conv0 = DSConv(
in_ch=5,
out_ch=10,
kernel_size=15,
extend_scope=1,
morph=0,
if_offset=True) # [5,10,15,1,True,0]
# if torch.cuda.is_available():
# A = A.to(device)
# conv0 = conv0.to(device)
out = conv0(A)
print(out.shape)
# print(out)
至此,有关DSConv修改的部分已经完成了,接下来就是修改YOLO的代码,修改的地方有三处 1 yolo.py 2 Yolov5m-dscon.yaml 3 train.py
1 这里建议直接拷贝一份 yolo.py 命名为 yolo_dsconv.py
然后导入
然后修改这里

2 建立配置文件 替换Conv或其他【这里给出我的一个配置文件,有涨点效果】
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, My_DSConv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, My_DSConv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]3 train.py
把yolo原来的给注释掉,然后从我们的 yolo_dsconv导入
讨论:
- 最好不要改动太大,效果可能会很差
- 我的模型配置在我的数据集上有涨点效果,但是感觉相较于原有模型,其参数量 增加不少,感觉有点 空间换效率的味道
- 大家可以多尝试修改不同的配置,一起讨论
最后,感觉论文原作者的工作,欢迎大家一起来讨论,有问题留言或加群【群号:615988639】!
